


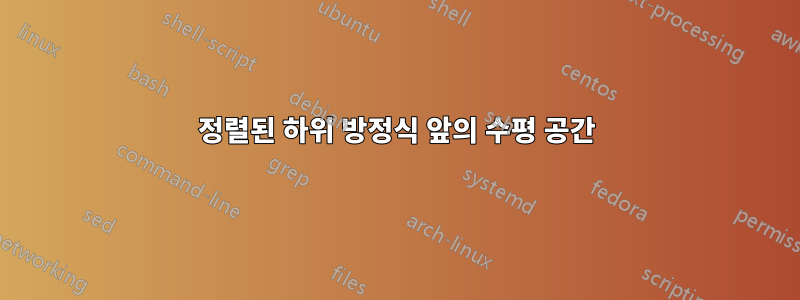
정렬된 하위 방정식 환경을 사용했지만 어떤 이유로 방정식이 용지 오른쪽에 정렬되어 떨어집니다. 나는 그들이 방정식의 아래가 아니라 오른쪽에 방정식 번호를 사용하여 중앙에 있고 = 기호에 정렬되기를 원합니다. 이것은 내 코드입니다.
\documentclass{report}
\usepackage[utf8]{inputenc}
\usepackage[T1]{fontenc}
\usepackage{geometry}
\geometry{a4paper}
\usepackage{mathtools}
\usepackage{graphicx}
\usepackage{booktabs}
\usepackage{amsmath}
\usepackage{amssymb}
\usepackage{tikz} %for simple drawings and diagram
\usetikzlibrary{fit,shapes.geometric}
\usetikzlibrary{arrows}
\usetikzlibrary{shapes}
\usepackage{pgfplots}
\usepackage{caption}
\usepackage{subcaption}
%page numbering abstract
\usepackage{etoolbox}
\patchcmd{\abstract}{\titlepage}{\clearpage}{}{}
\patchcmd{\andabstract}{\endtitlepage}{\clearpage}{}{}
%for bibliography
\usepackage{natbib}
\bibliographystyle{apa}
%Includes "References" in the table of contents
\usepackage[nottoc]{tocbibind}
%to use subsections
\usepackage{titlesec}
\titleformat{\chapter}[hang]
{\normalfont\huge\bfseries}
{\thechapter}{20pt}{\huge}
\begin{document}
\chapter{Results}
\section{Elasticity analysis}
\begin{subequations} \allowdisplaybreaks
\begin{align}
\frac{\partial \lambda}{\partial q_{T,1}}&=\frac{q_{T,2}n_Tf_T(1-v)\lambda^3-q_{T,2}n_Tf_T(1-v)(q_{L,2}q_{L,1}n_Lf_L+s_{L,2}s_{L,1})\lambda^2}{denominator} \\
\frac{\partial \lambda}{\partial q_{T,2}}&=\frac{q_{T,1}n_Tf_T(1-v)\lambda^3-q_{T,1}n_Tf_T(1-v)(q_{L,2}q_{L,1}n_Lf_L+s_{L,2}s_{L,1})\lambda^2}{denominator} \\
\frac{\partial \lambda}{\partial q_{L,1}}&=\frac{q_{L,2}n_Lf_L\lambda^3-q_{L,2}n_Lf_L(q_{T,2}q_{T,1}n_Tf_T(1-v)+s_{T,2}s_{T,1})2\lambda}{denominator} \\
\frac{\partial \lambda}{\partial q_{L,2}}&=\frac{q_{L,1}n_Lf_L\lambda^3-q_{L,1}n_Lf_L(q_{T,2}q_{T,1}n_Tf_T(1-v)+s_{T,2}s_{T,1})2\lambda}{denominator} \\
\frac{\partial \lambda}{\partial a_{T,1}}&=\frac{s_{T,2}\lambda^3-s_{T,2}(q_{L,2}q_{L,1}n_Lf_L+s_{L,2}s_{L,1}\lambda^2}{denominator} \\
\frac{\partial \lambda}{\partial s_{T,2}}&=\frac{s_{T,1}\lambda^3-s_{T,1}(q_{L,2}q_{L,1}n_Lf_L+s_{L,2}s_{L,1}\lambda^2}{denominator} \\
\frac{\partial \lambda}{\partial s_{L,1}}&=\frac{s_{L,2}\lambda^3-(s_{L,2}q_{T,2}q_{T,1}n_Tf_T(1-v)+s_{L,2}s_{T,2}s_{T,1})\lambda^2}{denominator} \\
\frac{\partial \lambda}{\partial s_{L,2}}&=\frac{s_{L,1}\lambda^3-(s_{L,1}q_{T,2}q_{T,1}n_Tf_T(1-v)+s_{L,2}s_{T,2}s_{T,1})\lambda^2}{denominator} \\
\frac{\partial \lambda}{\partial n_T}&=\frac{q_{T,2}q_{T,1}f_T(1-v)\lambda^3-q_{T,2}q_{T,1}f_T(1-v)(q_{L,2}q_{L,1}n_Lf_L+s_{L,2}s_{L,1})\lambda^2}{denominator} \\
\frac{\partial \lambda}{\partial f_T}&=\frac{q_{T,2}q_{T,1}n_T(1-v)\lambda^3-q_{T,2}q_{T,1}n_T(1-v)(q_{L,2}q_{L,1}n_Lf_L+s_{L,2}s_{L,1})\lambda^2}{denominator} \\
\frac{\partial \lambda}{\partial n_L}&=\frac{q_{L,2}q_{L,1}f_L\lambda^3-q_{L,2}q_{L,1}f_L(q_{T,2}q_{T,1}n_Tf_T(1-v)+s_{T,2}s_{T,1})\lambda^2}{denominator} \\
\frac{\partial \lambda}{\partial f_L}&=\frac{q_{L,2}q_{L,1}n_L\lambda^3-q_{L,2}q_{L,1}n_L(q_{T,2}q_{T,1}n_Tf_T(1-v)+s_{T,2}s_{T,1})\lambda^2}{denominator} \\
\frac{\partial \lambda}{\partial v}&=\frac{-q_{T,2}q_{T,1}n_Tf_T\lambda^3+q_{T,2}q_{T,1}n_Tf_T(q_{L,2}q_{L,1}n_Lf_L+s_{L,2}s_{L,1}\lambda^2}{denominator} \\
\text{with }
denominator=4\lambda^3-(q_{L,2}q_{L,1}n_Lf_L+s_{L,2}s_{L,1}+q_{T,2}q_{T,1}n_Tf_T(1-v)+s_{T,2}s_{T,1})3\lambda^2 \\
+(q_{L,2}q_{L,1}n_Lf_L+s_{L,2}s_{L,1})(q_{T,2}q_{T,1}n_Tf_T(1-v)+s_{T,2}s_{T,1})2\lambda
\end{align}
\end{subequations}
답변1
저는 그 분수를 피하고 분모를 왼쪽으로 옮기겠습니다. 그 의미디별도의 디스플레이에 표시될 수 있습니다.
\documentclass{report}
\usepackage[utf8]{inputenc}
\usepackage[T1]{fontenc}
\usepackage{geometry}
\geometry{a4paper}
\usepackage{mathtools}
\usepackage{graphicx}
\usepackage{booktabs}
\usepackage{amsmath}
\usepackage{amssymb}
\usepackage{tikz} %for simple drawings and diagram
\usetikzlibrary{fit,shapes.geometric}
\usetikzlibrary{arrows}
\usetikzlibrary{shapes}
\usepackage{pgfplots}
\usepackage{caption}
\usepackage{subcaption}
%page numbering abstract
\usepackage{etoolbox}
\patchcmd{\abstract}{\titlepage}{\clearpage}{}{}
\patchcmd{\andabstract}{\endtitlepage}{\clearpage}{}{}
%for bibliography
\usepackage{natbib}
\bibliographystyle{apa}
%Includes "References" in the table of contents
\usepackage[nottoc]{tocbibind}
%to use subsections
\usepackage{titlesec}
\titleformat{\chapter}[hang]
{\normalfont\huge\bfseries}
{\thechapter}
{20pt}
{}
\newcommand{\pder}[2]{\frac{\partial#1}{\partial#2}}
\begin{document}
\chapter{Results}
\section{Elasticity analysis}
\begin{subequations} \allowdisplaybreaks
\begin{align}
D\pder{\lambda}{q_{T,1}}&=
q_{T,2}n_Tf_T(1-v)\lambda^3-q_{T,2}n_Tf_T(1-v)(q_{L,2}q_{L,1}n_Lf_L+s_{L,2}s_{L,1})\lambda^2 \\
D\pder{\lambda}{q_{T,2}}&=
q_{T,1}n_Tf_T(1-v)\lambda^3-q_{T,1}n_Tf_T(1-v)(q_{L,2}q_{L,1}n_Lf_L+s_{L,2}s_{L,1})\lambda^2 \\
D\pder{\lambda}{q_{L,1}}&=
q_{L,2}n_Lf_L\lambda^3-q_{L,2}n_Lf_L(q_{T,2}q_{T,1}n_Tf_T(1-v)+s_{T,2}s_{T,1})2\lambda \\
D\pder{\lambda}{q_{L,2}}&=
q_{L,1}n_Lf_L\lambda^3-q_{L,1}n_Lf_L(q_{T,2}q_{T,1}n_Tf_T(1-v)+s_{T,2}s_{T,1})2\lambda \\
D\pder{\lambda}{a_{T,1}}&=
s_{T,2}\lambda^3-s_{T,2}(q_{L,2}q_{L,1}n_Lf_L+s_{L,2}s_{L,1}\lambda^2 \\
D\pder{\lambda}{s_{T,2}}&=
s_{T,1}\lambda^3-s_{T,1}(q_{L,2}q_{L,1}n_Lf_L+s_{L,2}s_{L,1}\lambda^2 \\
D\pder{\lambda}{s_{L,1}}&=
s_{L,2}\lambda^3-(s_{L,2}q_{T,2}q_{T,1}n_Tf_T(1-v)+s_{L,2}s_{T,2}s_{T,1})\lambda^2 \\
D\pder{\lambda}{s_{L,2}}&=
s_{L,1}\lambda^3-(s_{L,1}q_{T,2}q_{T,1}n_Tf_T(1-v)+s_{L,2}s_{T,2}s_{T,1})\lambda^2 \\
D\pder{\lambda}{n_T}&=
q_{T,2}q_{T,1}f_T(1-v)\lambda^3-q_{T,2}q_{T,1}f_T(1-v)(q_{L,2}q_{L,1}n_Lf_L+s_{L,2}s_{L,1})\lambda^2 \\
D\pder{\lambda}{f_T}&=
q_{T,2}q_{T,1}n_T(1-v)\lambda^3-q_{T,2}q_{T,1}n_T(1-v)(q_{L,2}q_{L,1}n_Lf_L+s_{L,2}s_{L,1})\lambda^2 \\
D\pder{\lambda}{n_L}&=
q_{L,2}q_{L,1}f_L\lambda^3-q_{L,2}q_{L,1}f_L(q_{T,2}q_{T,1}n_Tf_T(1-v)+s_{T,2}s_{T,1})\lambda^2 \\
D\pder{\lambda}{f_L}&=
q_{L,2}q_{L,1}n_L\lambda^3-q_{L,2}q_{L,1}n_L(q_{T,2}q_{T,1}n_Tf_T(1-v)+s_{T,2}s_{T,1})\lambda^2 \\
D\pder{\lambda}{v}&=
-q_{T,2}q_{T,1}n_Tf_T\lambda^3+q_{T,2}q_{T,1}n_Tf_T(q_{L,2}q_{L,1}n_Lf_L+s_{L,2}s_{L,1}\lambda^2
\end{align}
where
\begin{multline*}
D=4\lambda^3-(q_{L,2}q_{L,1}n_Lf_L+s_{L,2}s_{L,1}+q_{T,2}q_{T,1}n_Tf_T(1-v)+s_{T,2}s_{T,1})3\lambda^2 \\
+(q_{L,2}q_{L,1}n_Lf_L+s_{L,2}s_{L,1})(q_{T,2}q_{T,1}n_Tf_T(1-v)+s_{T,2}s_{T,1})2\lambda
\end{multline*}
\end{subequations}
\end{document}
