


3DR Solo UAV가 두 대 있습니다. 드론과 비지박스 Linux를 실행하는 컨트롤러 모두에 ARM 컴퓨터가 있습니다.
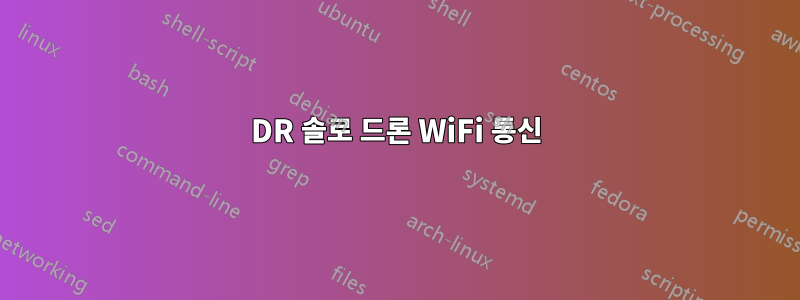
내가 이해한 바로는: 기본적으로 컨트롤러는 무선 액세스 포인트 역할을 합니다. SSID:SoloLink가 있습니다. 이 그림은 기본 설정을 보여줍니다.

컨트롤러는 안테나가 2개 달린 것으로 화면에 "SOLO"라고 표시되고 실제 UAV/드론은 X자 모양입니다.
이것은 잘 작동하며 컨트롤러( )에 직접 SSH를 연결하고 ( ) 를 사용하여 실제 솔로에 연결할 수 있습니다.ssh [email protected]ssh [email protected]
3DR의 github 페이지에 있는 Python 유틸리티에서 명령을 실행할 수 있습니다. github.com/3drobotics/solo-cli/blob/master/soloutils/wifi.py(죄송하지만 제 평판 때문에 링크가 2개만 있을 수 있습니다.) 컨트롤러에 다른 WiFi 네트워크에 연결하라고 지시합니다. 라우터 역할을 하고 SSID:ubnt를 갖도록 Ubiquity PicoStation을 설정했습니다. 컨트롤러를 ubnt네트워크에 연결하기 위해 네트워크에 연결 SoloLink하고 solo wifi --name=ubnt. 이것이 기본적으로 수행하는 작업은 bash 스크립트를 생성하고 실행하는 것입니다.
if [ "$#" -lt "2" ]; then
echo "Usage: `basename $0` timeout_in_seconds command" >&2
echo "Example: `basename $0` 2 sleep 3 || echo timeout" >&2
exit 1
fi
cleanup()
{{
trap - ALRM #reset handler to default
kill -ALRM $a 2>/dev/null #stop timer subshell if running
kill $! 2>/dev/null && #kill last job
exit 124 #exit with 124 if it was running
}}
watchit()
{{
trap "cleanup" ALRM
sleep $1& wait
kill -ALRM $$
}}
watchit $1& a=$! #start the timeout
shift #first param was timeout for sleep
trap "cleanup" ALRM INT #cleanup after timeout
"$@"& wait $!; RET=$? #start the job wait for it and save its return value
kill -ALRM $a #send ALRM signal to watchit
wait $a #wait for watchit to finish cleanup
exit $RET #return the value
SCRIPT
cat > /tmp/setupwifi.sh << 'SCRIPT'
# Delete old files
rm /mnt/rootfs.rw/lib/modules/3.10.17-rt12-*/kernel/net/ipv4/netfilter/iptable_filter.ko || true
/etc/init.d/hostapd stop
killall wpa_supplicant || true
killall udhcpc || true
cat <<EOF > /etc/wpa_client.conf
network={{
{credentials}
}}
EOF
echo 1 > /proc/sys/net/ipv4/ip_forward
sed -i.bak 's/dhcp-option=3.*/dhcp-option=3,10.1.1.1/g' /etc/dnsmasq.conf
sed -i.bak 's/dhcp-option=6.*/dhcp-option=6,8.8.8.8/g' /etc/dnsmasq.conf
/etc/init.d/dnsmasq restart
sleep 2
echo 'connecting to the internet...'
wpa_supplicant -i wlan0 -c /etc/wpa_client.conf -B
/tmp/timeout.sh 15 udhcpc -i wlan0 || {{
echo -e "\\nerror: wrong credentials or couldn't connect to wifi network!\\n"
ifconfig wlan0 down
}}
/etc/init.d/hostapd start
sleep 3
wget -O- http://example.com/ --timeout=5 >/dev/null 2>&1
if [[ $? -ne '0' ]]; then
echo ''
echo 'error: could not connect to the Internet!'
echo 'please check your wifi credentials and try again.'
else
echo 'setting up IP forwarding...'
insmod /lib/modules/3.10.17-rt12-*/kernel/net/ipv4/netfilter/iptable_filter.ko 2>/dev/null
iptables -t nat -A POSTROUTING -o wlan0 -j MASQUERADE
iptables -A FORWARD -i wlan0 -o wlan0-ap -j ACCEPT
iptables -A FORWARD -i wlan0-ap -o wlan0 -j ACCEPT
echo ''
echo 'success: Solo is now connected to the Internet.'
echo 'if your computer does not yet have Internet access, try'
echo "disconnecting and reconnecting to Solo's wifi network."
fi
SCRIPT
chmod +x /tmp/timeout.sh
chmod +x /tmp/setupwifi.sh
bash /tmp/setupwifi.sh > /log/setupwifi.log 2>&1
({credentials} 부분은 이 스크립트가 Python 스크립트의 큰 문자열에 있고 해당 부분을 내가 전달한 자격 증명으로 대체하기 때문입니다)
wlan0전달을 활성화하고, dnsmasq를 재구성하고, 새로운 WiFi 네트워크에 연결하도록 wpa_supplicant를 구성하고, wpa_supplicant를 시작한 다음 iptables를 재구성하여 인터페이스 에서 인터페이스로 wlan0-ap또는 그 반대로 트래픽을 전달하는 것 같습니다 . if/elsewget을 수행하지 않고 블록만 실행하도록 마지막 명령문을 수정했습니다 else.
이것은 잘 작동하며 네트워크에서 컨트롤러에 액세스할 수 있습니다 ubnt. 내 설정은 이제 다음과 같습니다.
 컨트롤러에 SSH로 연결할 수 있지만 네트워크에 Solo가 표시되지 않습니다. 노트북으로 시도했는데 라우터( ), 컨트롤러( ), 본인( )만 보입니다.
컨트롤러에 SSH로 연결할 수 있지만 네트워크에 Solo가 표시되지 않습니다. 노트북으로 시도했는데 라우터( ), 컨트롤러( ), 본인( )만 보입니다.ssh [email protected]nmap -sP 192.168.1.1/24192.168.1.1192.168.1.6192.168.1.76
이게 내가 막혔던 거야
컴퓨터에서 Solo 드론에 액세스할 수 있기를 원합니다. 컨트롤러에 두 개의 인터페이스가 있다는 것을 알지만 이를 연결하는 방법을 이해하지 못합니다.
이것의 목적은 다른 쌍을 동일한 ubnt네트워크에 연결한 다음 하나의 중앙 소스에서 두 개의 UAV를 모니터링/제어할 수 있고 필요한 경우 조종사가 루프에 있을 수 있도록 하는 것입니다.
도움이나 Google 용어를 알려 주시면 감사하겠습니다. 나는 네트워킹에 대한 경험이 많지 않으며 네트워킹과 관련된 명령과 용어를 검색하는 데 많은 어려움을 겪었습니다.
답변1
실제로 내 의견을 원하는 친구가 이 기사에 연결했습니다. 여기에서도 공유하겠습니다.
여기서 문제는 경로가 누락되었다는 것입니다. 귀하의 192.168.1.76IP(또는 모든 192.168.1.xIP)가 에 도달 하려면 10.1.1.x경로를 알아야 합니다. 동일한 서브넷의 IP(예: [ 10.1.1.1및 10.1.1.10] 또는 [ 192.168.1.76및 192.168.1.1])에는 통신 경로가 필요하지 않습니다. 그들은 브로드캐스트를 사용하여 특정 IP를 가진 장치를 찾고 트래픽을 직접 보냅니다.
한 서브넷에서 다른 서브넷으로 이동하려면 경로를 정의해야 합니다. 또한 BACK 경로를 정의해야 합니다. 따라서 다음을 시도해 볼 수 있습니다(라우터와 솔로 컨트롤러가 이를 지원하는 경우).
AP 에 경로가 필요합니다 192.168.1.1. 소스는 any, 대상은 10.1.1.0/24, 다음 홉은 192.168.1.6Solo 컨트롤러입니다. 컨트롤러는 두 네트워크를 모두 인식하므로 로 향하는 트래픽을 보내는 경우 10.1.1.10Solo~해야 한다거기에 가는 방법을 이미 알고 있고,~해야 한다함께 보내주세요. 또한 컨트롤러 자체가 사실상 드론의 네트워크 게이트웨이( 10.1.1.1)이기 때문에또한서브넷 을 인식하면 192.168.1.0/24거기에는 경로가 필요하지 않습니다. 돌아가는 경로가 암시됩니다.
해당 경로를 라우터( any>10.1.1.0/24>192.168.1.6)에 추가하고 문제가 해결되는지 확인하세요.